
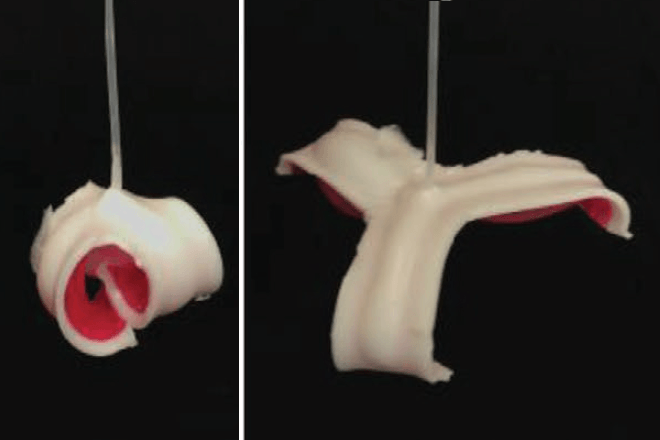
Our work led by PI Lab PhD grad Faye Yap, now a professor at U Hawaii, offers guidance on how curing impacts the strength of devices made from silicone elastomers. The paper is published in Science Advances and described in a short video.






Our work led by PI Lab PhD grad Faye Yap, now a professor at U Hawaii, offers guidance on how curing impacts the strength of devices made from silicone elastomers. The paper is published in Science Advances and described in a short video.
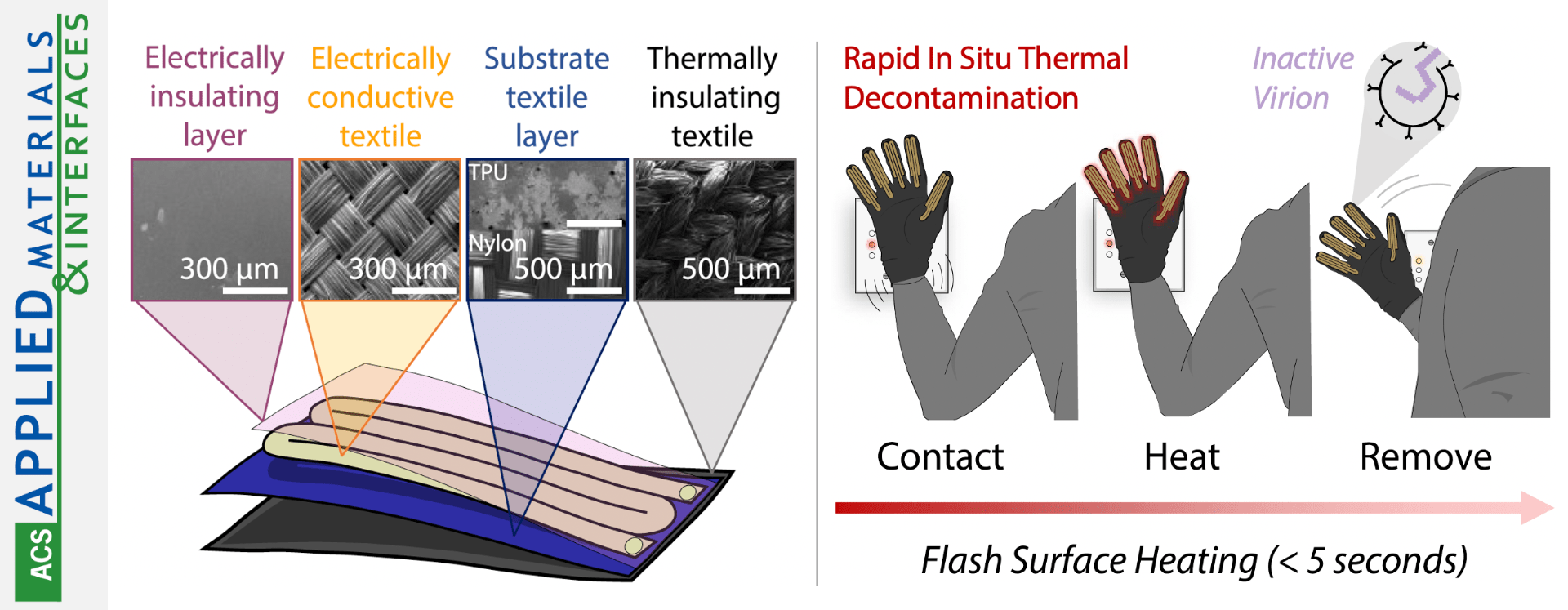
PhD candidate Marquise Bell led a collaboration with the Tao Lab to develop wearable materials that safely self-decontaminate in seconds while being worn on the body. Our work provides an alternative to single-use personal protective equipment.
Fluidically actuated haptic systems are soft, lightweight, and comfortable, but their electronic controllers can be cumbersome. Led by Barclay Jumet in collaboration with the MAHI Lab, our work describes offloading control to the fluidic domain.

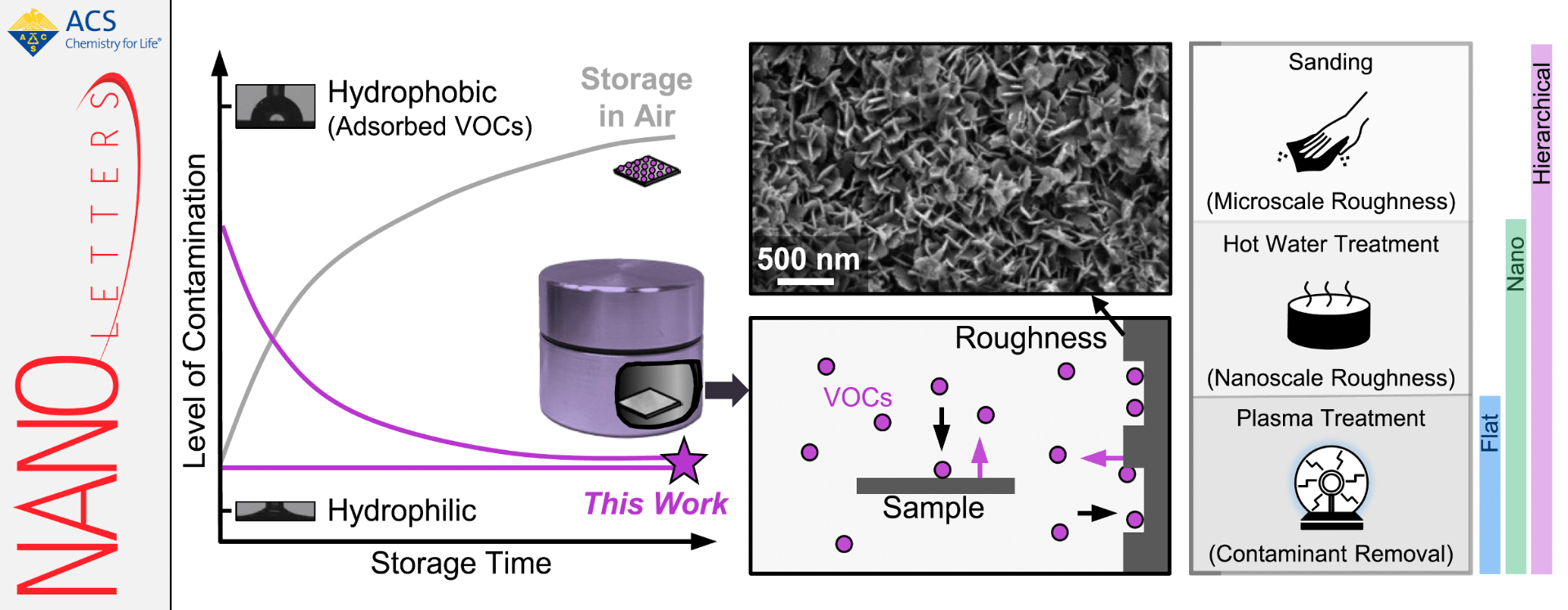
Surfaces exposed to volatile organic compounds (VOCs) often become contaminated, hindering nanofabrication and impeding progress in fundamental surface science research. Our paper in Nano Letters, led by Zhen Liu, addresses this issue.
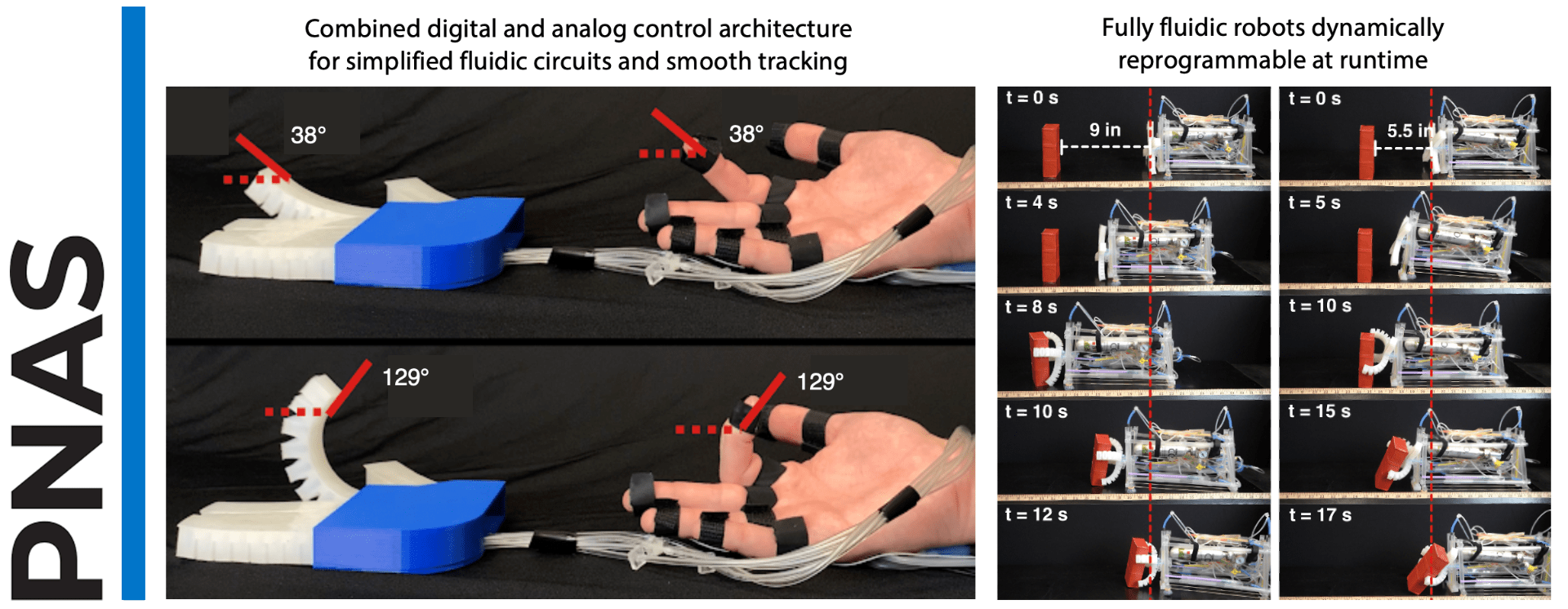
Our paper on combined digital and analog fluidic control for soft robots, led by Rice undergraduate researcher Colter Decker in collaboration with the Whitesides Lab, has been published in the Proceedings of the National Academy of Sciences (PNAS).
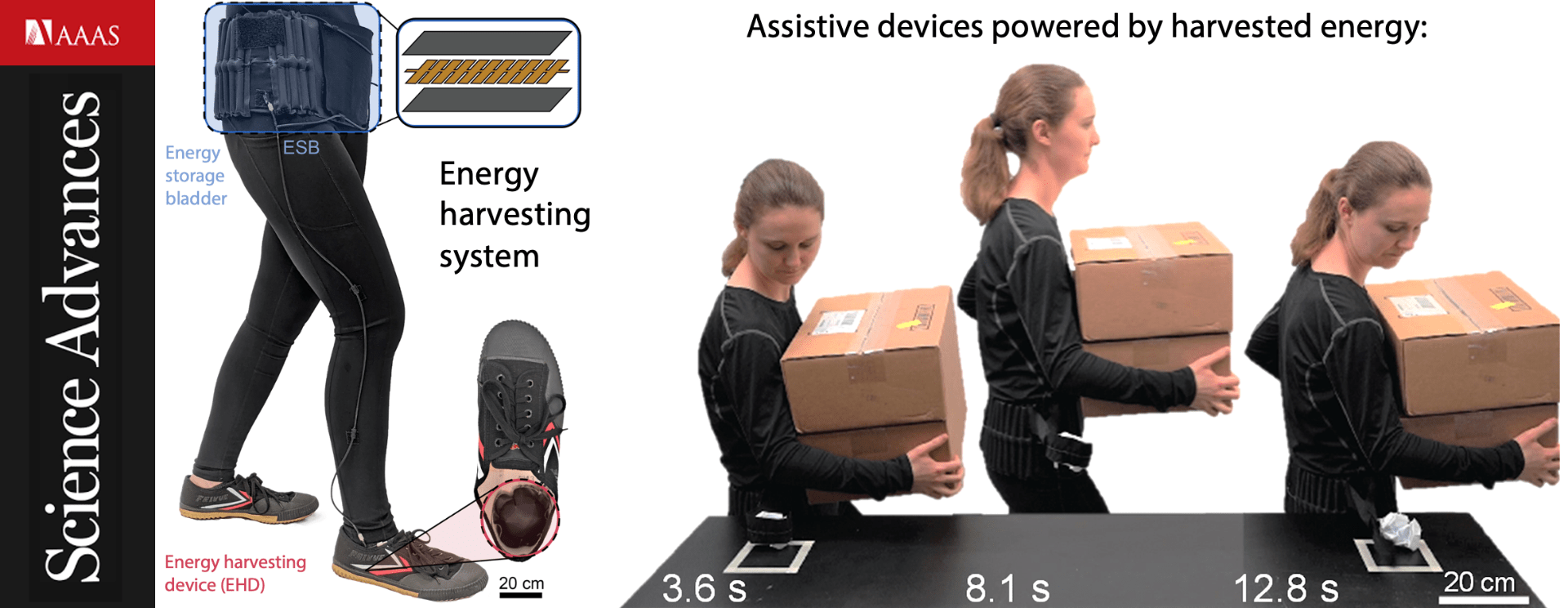
We developed a textile-based pneumatic energy harvesting system that generates up to 3 watts, outperforming electric approaches. Our paper, co-led by Rachel Shveda and Anoop Rajappan, has been published in Science Advances.
Our paper on logic-enabled textiles, led by postdoc Anoop Rajappan, has been published in the Proceedings of the National Academy of Sciences (PNAS). We describe a wearable textile-based platform for fluidic digital logic.

Our paper on necrobotics—the use of biotic materials in robotics applications—has been published in the open access journal Advanced Science. Led by Faye Yap, we repurposed the inanimate body of a spider as a robotic gripper.
