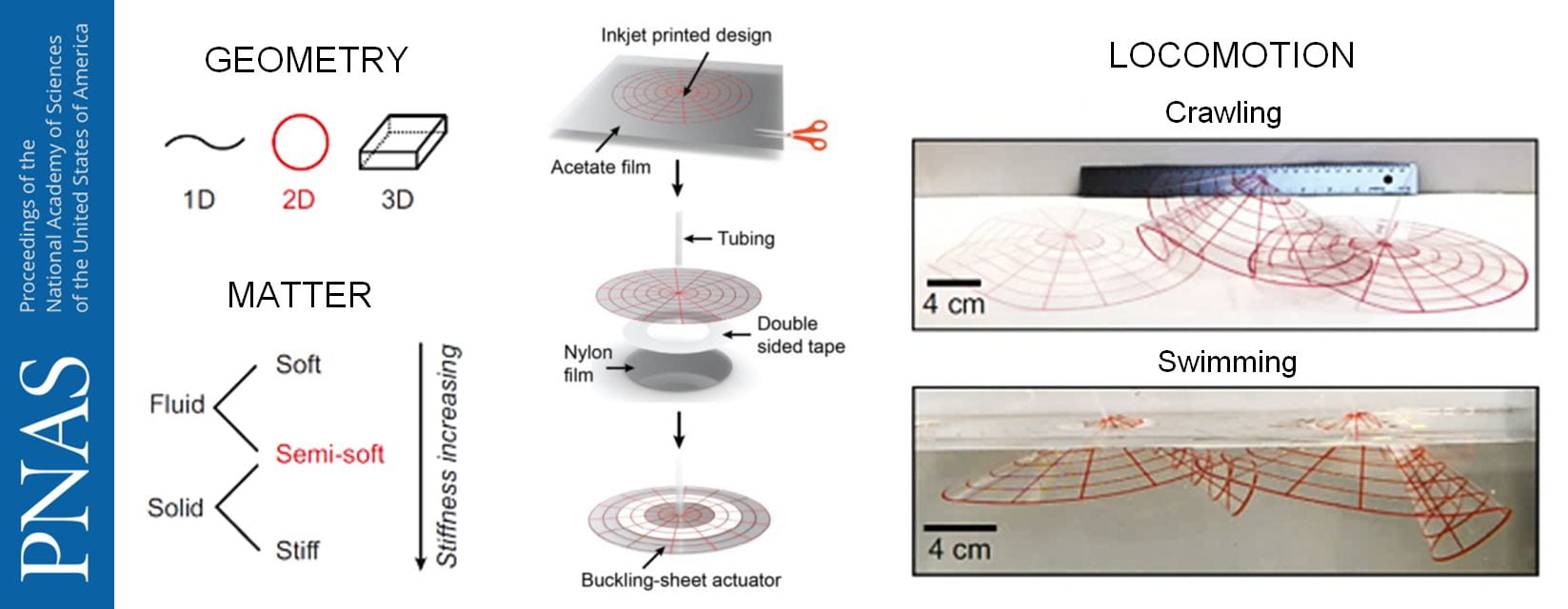
A paper led by collaborators Amit Nagarkar and Won-Kyu Lee has been published in PNAS. We show an amphibious morph-bot that can crawl on land or swim in water using a reversible conical buckling instability.
A paper led by collaborators Amit Nagarkar and Won-Kyu Lee has been published in PNAS. We show an amphibious morph-bot that can crawl on land or swim in water using a reversible conical buckling instability.